|
|

|
|
Hardwarekomponenten: 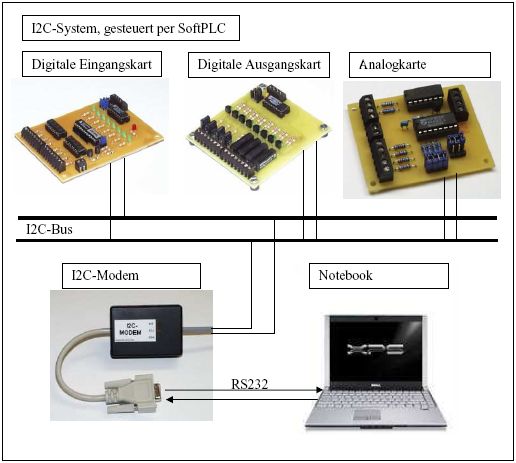 Das aufzubauende System setzt sich soweit aus folgenden Hardwarekomponenten zusammen:
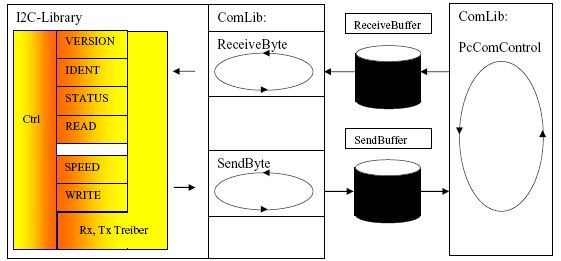
Softwarestruktur:
Die Software Architektur ist so aufgebaut, dass ein Controller READ_WRITE_IO_CTRL anhand einer Liste “Strukturarrays g_aCommunication” die einzelnen Funktionen VERSION, IDENT, STATUS, READ, SPEED und WRITE mit den Informationen aus dem “Strukturarrays g_aCommunication” aufruft und das Programm I2C_COM_Port für die Datenübertragung treibt. Die einzelnen Funktionen VERSION, IDENT, STATUS, READ, SPEED und WRITE sind eigenständig funktionstüchtig. Ein I2C-Library-User kann diese nach seinem eigenen Konzept aufrufen und verwenden. Der Controller READ_WRITE_IO_CTRL erlaubt eine Automatisierung der Anfragen von VERSION bis WRITE. Er arbeitet eine Anfrage nach der anderen ab, so wie es die Reihenfolge des Strukturarrays “g_aCommunication” vorgibt.
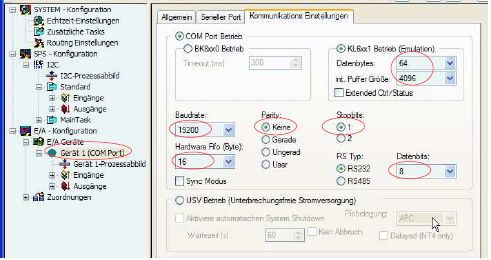
Parameter im TwinCAT Taskmanager:
Das I2C-Modem arbeitet mit 19200 Baud 8N1. Das heißt, da die Symbolwertigkeit gleich 1 ist, dass das I2C-Modem die Fähigkeit hat, 19200 Bit / Sekunde zu verarbeiten. Also für die Übertragung von einem Bit, wird 0.052 ms benötigt. 8N1 steht für 8 Datenbits, keine Parität und ein Stopbit.
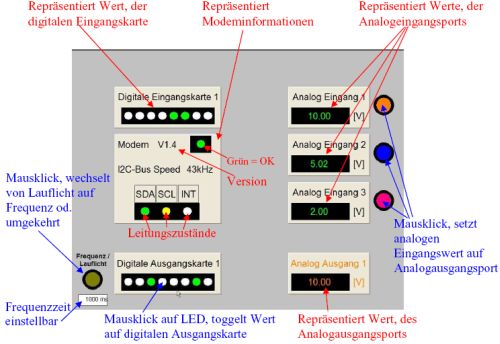
Bedienung des Beispielprogramms:
Weitere Infos zu TWINCAT finden Sie unter http://www.beckhoff.de
|
Copyright © www.horter.de All rights reserved.